Introduction:
In railway engineering the development of connecting components between railway vehicles, comprises the determination of the performed relative motions between two adjacent carbodies during operation. Existing measurement systems have the drawback of being extensive and time consuming regarding installation, measurement and analysis. This thesis was concerned with the feasibility study and prototype development of a robust and cost-efficient image-based measurement system, capable of tracking the relative motions between railway vehicle carbodies. The proposed system contributes a novel, genuine alternative to conventional methods applied to the particular task of measuring the relative motions between two railway vehicle carbodies. It perfectly fulfils the technical and economic requirements.
Main components of railway vehicles:

blue: carbodies, red: bogies, green: rails
Problem statement:
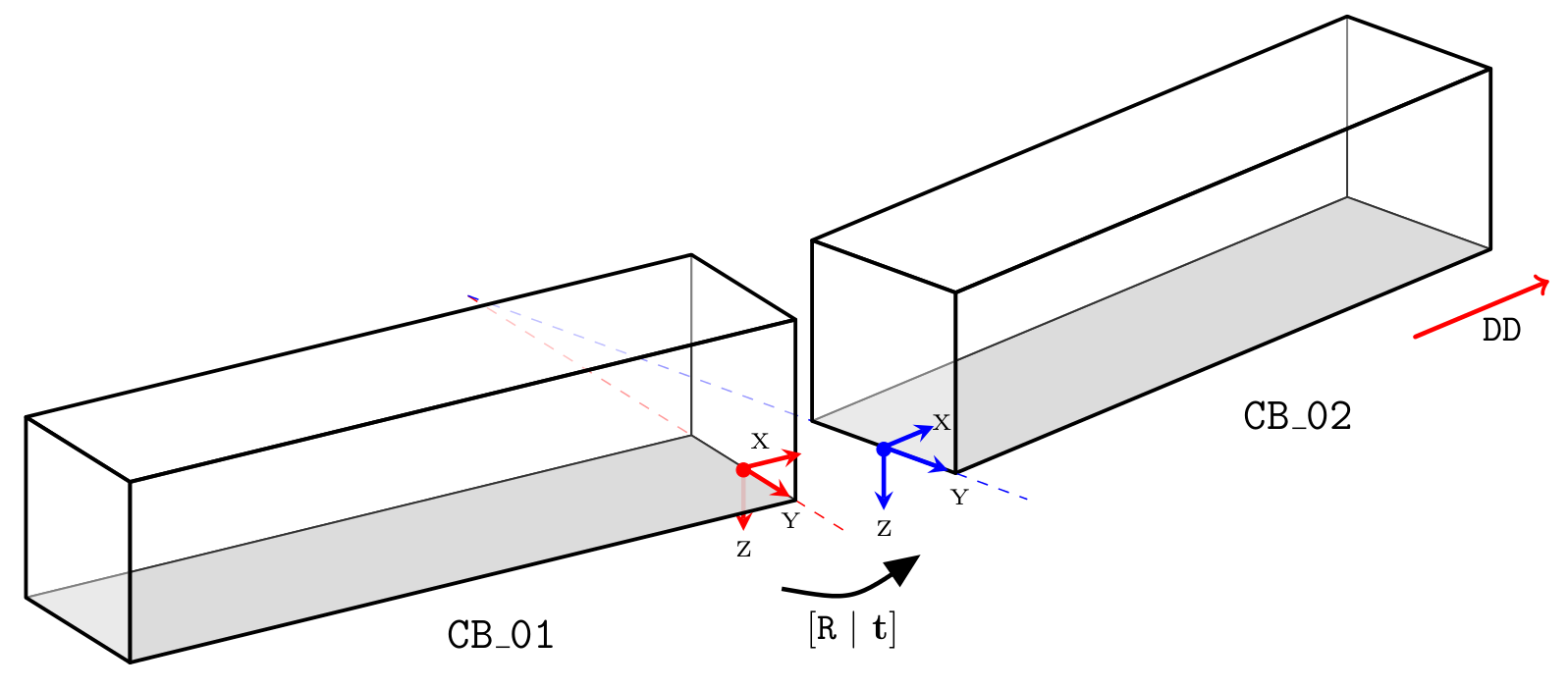
During operation two adjacent carbodies oscillate and therefore perform relative motions against each other. These relative motions, with six-degree-of-freedom (6DoF = 3 translations, 3 rotations), should be determined continually.
Measurement setup:
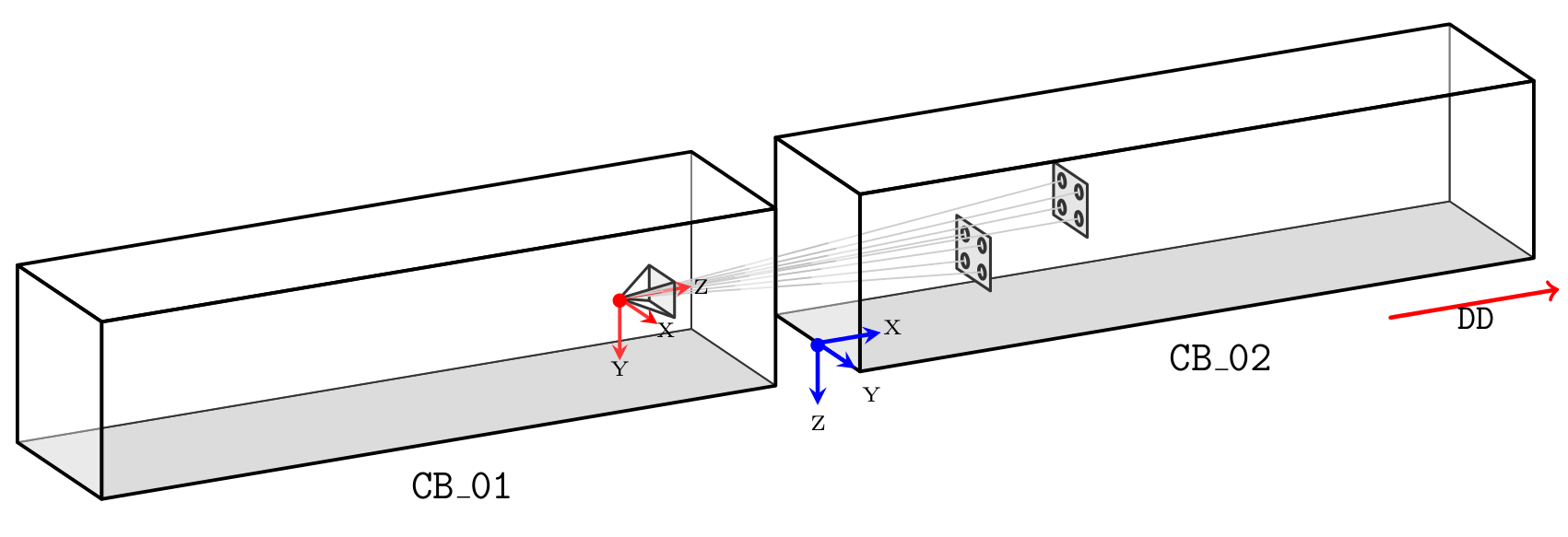
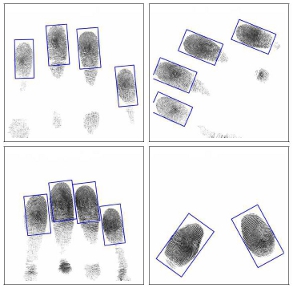
The initial problem is solved by the estimation of the pose (6 DoF) of a rigidly installed camera in the first carbody relative to a scene coordinate system. The camera records imagery data during a test ride. Then the relative motions between two adjacent carbodies is determined from the movements of the targets (white boards with concentric circles) within the images.
Videos: short version
| Simulation on test rig | Test of system in real world environment |
Results:
- Verification that system complies with required accuracy.
- Successful validation of feasibility of the developed system using the prototype implementation.
- Real world appliction of system during test ride on a high speed train at the Test and Validation Centre Wegberg-Wildenrath.
- Elaboration of a best practice approach for conducting on-site measurements.
Master’s Thesis:
File only contains the abstract and the contents because public access to the thesis is restricted.
 RobertHoedl_2013_MastersThesis_Abstract.pdf [.PDF | 280 K]
RobertHoedl_2013_MastersThesis_Abstract.pdf [.PDF | 280 K]
The Master’s Thesis was awarded the Siemens Railway Engineering Award 2014.
« Zurück zu Projekte